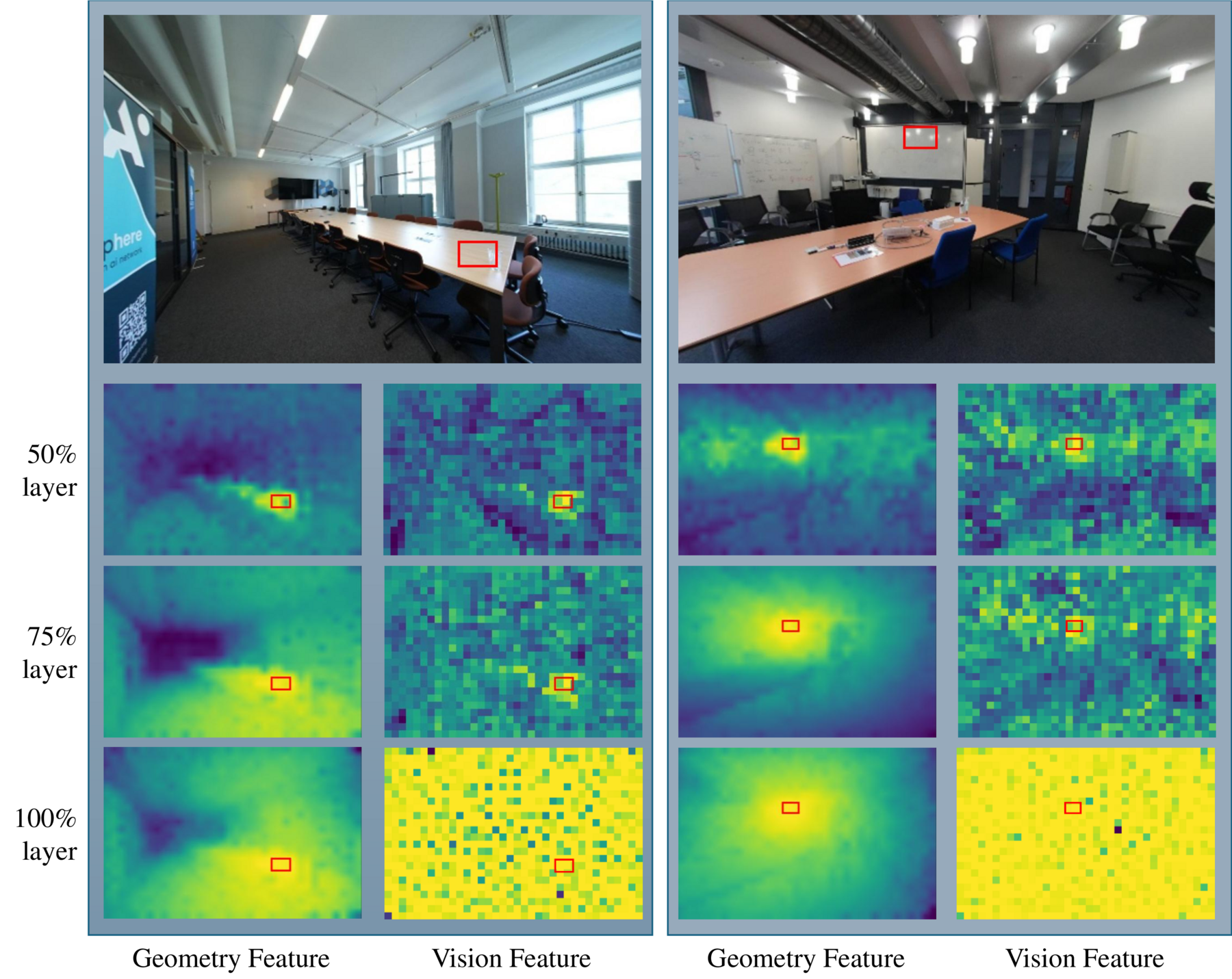
Large vision-language models (VLMs) still struggle with reliable 3D spatial reasoning, a core capability for embodied and physical AI systems. This limitation arises from their inability to capture fine-grained 3D geometry and spatial relationships. While recent efforts have introduced multi-view geometry transformers into VLMs, they typically fuse only the deep-layer features from vision and geometry encoders, discarding rich hierarchical signals and creating a fundamental bottleneck for spatial understanding.
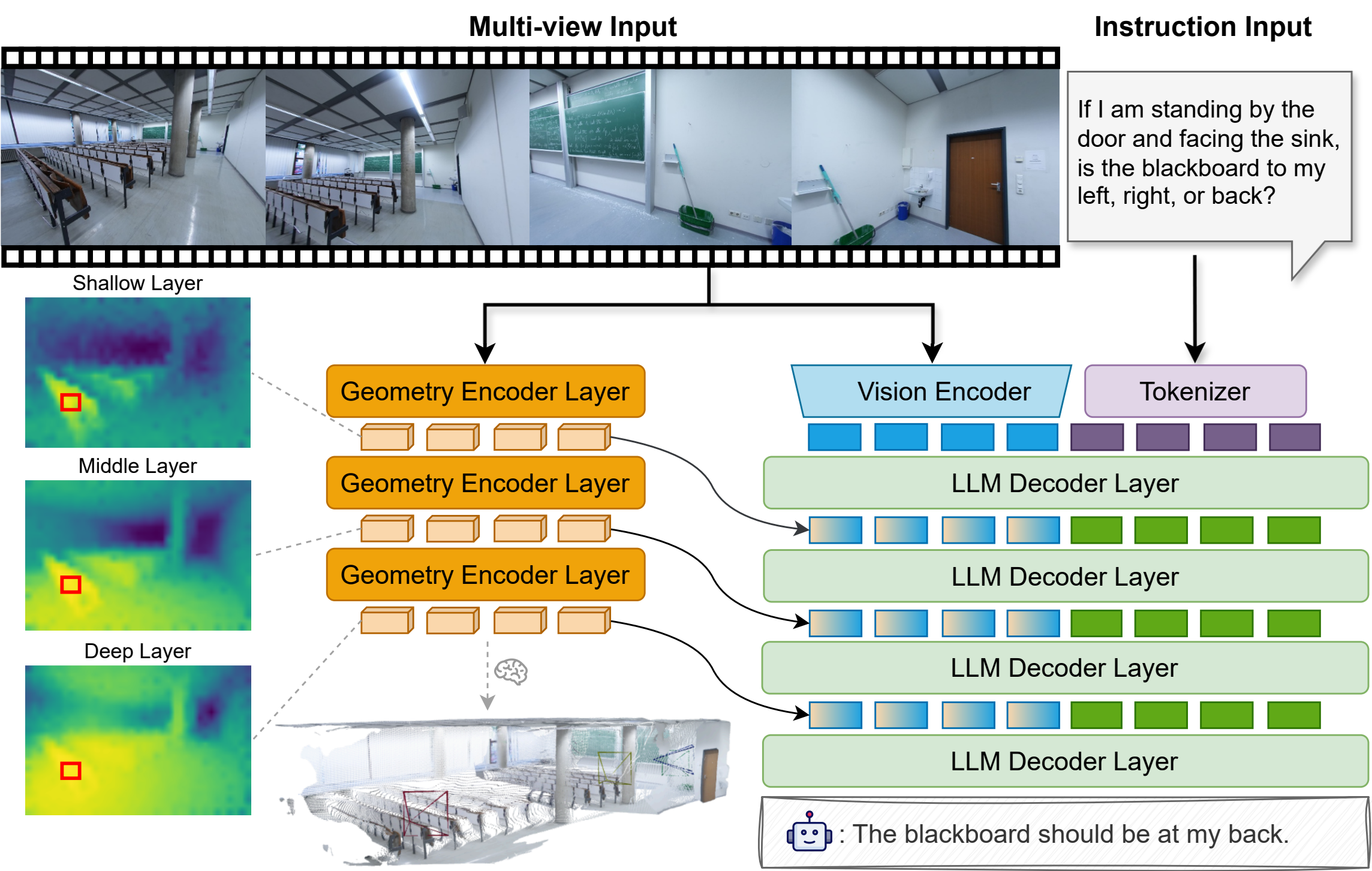
To overcome this, we propose SpatialStack, a general hierarchical fusion framework that progressively aligns vision, geometry, and language representations across the model hierarchy. Moving beyond conventional late-stage vision-geometry fusion, SpatialStack stacks and synchronizes multi-level geometric features with the language backbone, enabling the model to capture both local geometric precision and global contextual semantics. Building upon this framework, we develop VLM-SpatialStack, a model that achieves state-of-the-art performance on multiple 3D spatial reasoning benchmarks. Extensive experiments and ablations demonstrate that our multi-level fusion strategy consistently enhances 3D understanding and generalizes robustly across diverse spatial reasoning tasks, establishing SpatialStack as an effective and extensible design paradigm for vision-language-geometry integration in next-generation multimodal physical AI systems.